关键词 |
模具立体仓库,新余立体仓库,文档立体仓库,模具立体仓库 |
面向地区 |
全国 |
该智能机器人仓储物流系统主要包括自动化立体仓库、平台式AGV、复合机器人、双臂机器人、叉车AGV等硬件设备。
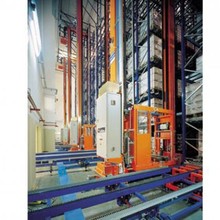
(1)自动化立体仓库
自动化立体仓库是现代生产系统自动化程度提高的重要标志,在有限的占地面积下能够实现货物的大量、有效存储,充分利用空间资源。如图3所示,本文设计自动化立体仓库包括货架、堆垛机、出入库平台组成。其中堆垛机的行走轴实现堆垛机沿着立体仓库长度方向运动、升降轴实现堆垛机沿着立体仓库高度方向运动,货叉伸缩轴实现货物托盘的抓取。出入库平台安装有货物托盘检测传感器,用于判断出入库平台与机器人的对接情况。零件出入库平台设有一段升降式运输平台①,其处于低位时与平台AGV对接,处于高位时与出入库平台②对接。

平台式 AGV
平台式AGV能够实现物品的自动化可靠运输及自动投送。其搭载激光传感器、超声波传感器。基于激光SLAM的定位导航算法,结合超声波传感器,实现自主行走及自主避障。其控制台可以集中调度、监控、管理 AGV 系统的运行状态活动。

复合机器人复合机器人由移动底盘及关节柔性机械臂组成。其整体融入视觉系统、多样化的导航配置、的二次视觉定位等技术,使机器人精度更高、更加智能化。可以广泛应用于3C行业、自动化工厂、仓储分拣、自动化货物超市等,实现物料自动搬运、物品上下料、物料分拣等。
双臂机器人双臂机器人采用两个7自由度柔性机械臂组成, 能够集成化与柔性化地实现快速、安全、灵活、、高 效的旋拧、定位等全套装配解决方案。该机器人系统配有视觉系统,具有视觉识别引导抓取功能,末端采用电控夹爪,实现对工件的稳定抓取。
设备状态监测:平台式AGV及叉车AGV 状态监测包括AGV位置监测、电量监测、载货状态监测和运行状态监测等;复合机器人状态监测包括位置监测、电量监测、载货状态监测、使能状态监测和空闲状态监测等;双臂机器人状态监测包括机器人使能状态监测、机器人空闲状态监测、料台上下料完成状态监测等;立体仓库状态监测包括立体仓库堆垛机使能状态监测、空闲状态监测、货架中货物状态监测、出入库平台空间状态监测、出入库平台上下料完成状态监测等。
为了凸显二维码的轮廓,本文采用在原二维码基础上加入矩形外轮廓,中心与二维码中心重合,如图8所示。使用加入矩形外轮廓的二维码检测效果好,不易被误检测,可以显著提高边缘检测的正确识别率。
AGV经过视觉位移处理和旋转处理,可以调节AGV当前位姿,提高AGV的定位精度,AGV与其他设备的对接可靠稳定。
利用齿轮箱的模拟装配拆解工作对本文智能机器人仓储物流系统进行了应用验证。通过总控调度系统软件及各机器人系统的通讯,能够实现对齿轮箱的装配和拆解。设计开发的总控调度软件经过长期运行和反复测试,能够正确显示各设备状态,并且具有较好的用户使用界面,工作性能良好。软件运行结构如图11所示。图11a中各个按钮分别代表各机器人的不同动作,主要用于调试及单步操作。图11b 则为自动动作流程,装配模式启动后,总控调度软件就会按照的4个零件出库,然后通过平台式AGV、复合机器人、运输到双臂机器人装配台处,通过双臂机器人组装成成品放回成品料盘中, 成品料盘经复合机器人、叉车AGV运输到成品库位中,零件料盘经复合机器人、平台式AGV运输回零件库位中。
齿轮箱的装配和拆解过程严格按照工艺流程执行,验证了本文所设计的智能机器人仓储物流系统的可靠性及稳定性。平台式AGV与出入库平台的成功对接验证了本文二维码视觉定位的有效性及稳定性。